칩 레벨 원시 심도 데이터를 활용하는 링봇-뎁스(LingBot-Depth) / 사진. 오르벡
로봇 및 AI 비전 분야의 글로벌 공급업체 오르벡(Orbbec)이 앤트 그룹 산하 AI 기업 로비언트(Robbyant)와 전략적 파트너십을 체결하고, 고정밀 오픈소스 공간 인식 모델 ‘링봇-뎁스(LingBot-Depth)’를 공개했다.
링봇-뎁스는 로봇이 실제 환경에서 안정적으로 공간을 인식하고 행동할 수 있도록 설계된 심도 인식 모델로, 체화지능(Embodied Intelligence) 로봇의 인식 한계를 근본적으로 확장하는 것을 목표로 한다.
이번 협력에서 오르벡은 링봇-뎁스 개발 전 과정에 핵심 심도 센싱 하드웨어와 기술 지원을 제공했다. 모델은 오르벡 플랫폼을 기반으로 공동 최적화됐으며, 결과 성능은 오르벡 심도 비전 연구소에서 검증과 인증을 거쳤다. 고정밀 센싱 하드웨어와 고급 인식 알고리즘을 통합함으로써 시각적으로 복잡한 환경에서도 신뢰도 높은 공간 인식을 구현했다는 평가다.
링봇-뎁스는 NYUv2와 ETH3D 벤치마크 평가에서 기존 대표 모델을 상회하는 깊이 추정 정확도를 기록했다. 오르벡의 Gemini 330 스테레오 깊이 카메라와 공동 최적화된 결과, 실내 환경에서 상대 오차(REL)를 70% 이상 감소시켰으며, 희소 구조 기반 모션(SfM) 시나리오에서는 RMSE를 약 47% 줄였다.
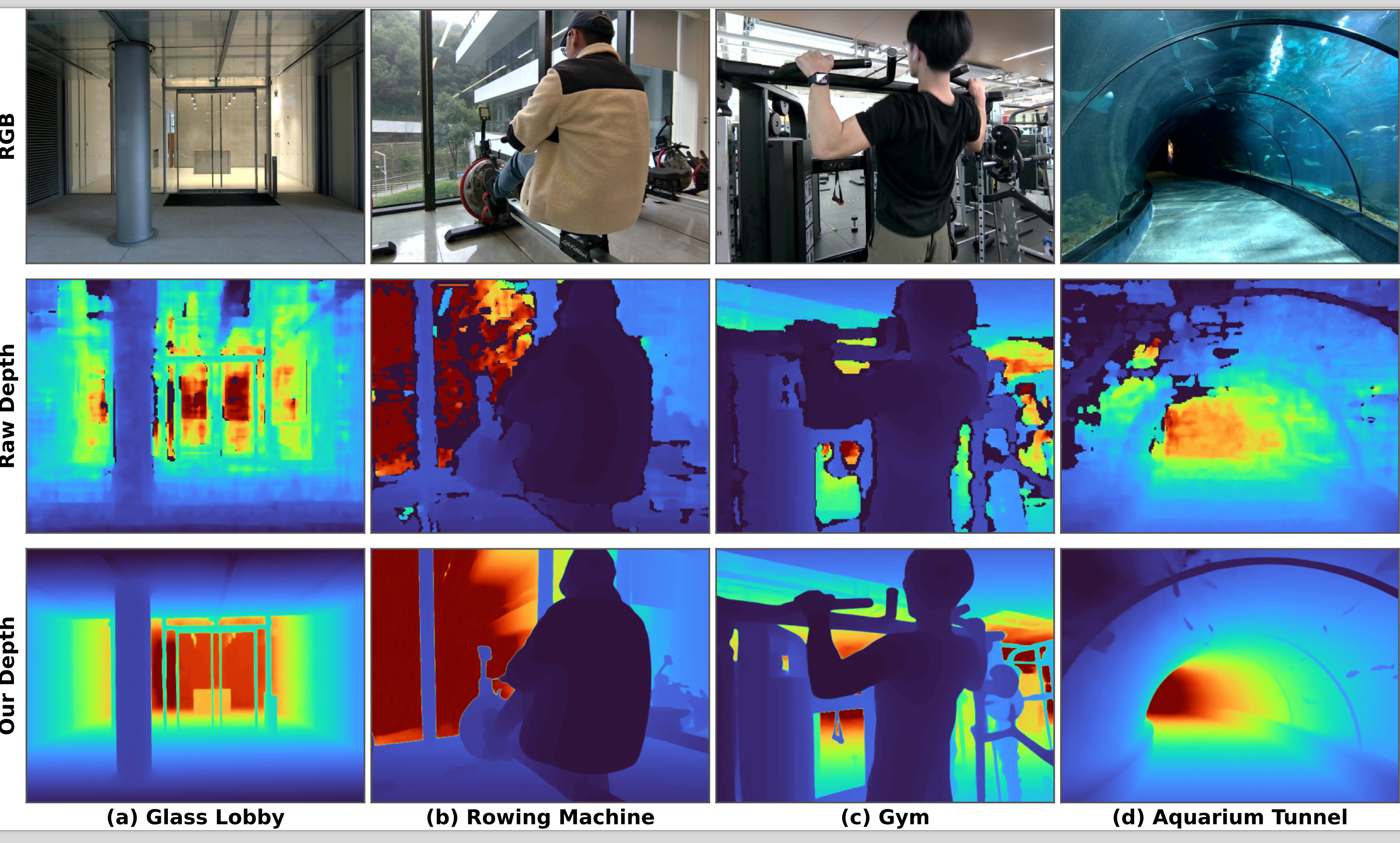
특히 Gemini 330에서 직접 수집한 칩 레벨 심도 데이터를 활용해 누락된 깊이 정보를 지능적으로 복원함으로써, 반사·투명 재질과 같은 까다로운 광학 조건에서도 인식 안정성을 크게 높였다. 데이터 수집부터 학습·검증까지 동일한 하드웨어 기반으로 일관되게 설계된 점이 성능 향상의 핵심 요인으로 분석된다.
오르벡의 Gemini 330은 자체 개발한 MX6800 심도 엔진 칩을 탑재한 스테레오 3D 카메라다. 능동·수동 이미징 기술을 융합해 완전한 암흑부터 직사광선 환경까지 안정적인 3D 데이터를 제공하며, 온디바이스 심도 연산을 통해 지연 시간과 연산 부담을 최소화했다.
로비언트는 센서 데이터가 불완전한 환경을 보완하기 위해 마스크드 깊이 모델링(MDM)을 적용했다. 링봇-뎁스는 RGB 이미지의 텍스처와 객체 윤곽, 장면 맥락을 분석해 손상된 심도 영역을 추론·재구성하며, 조밀하고 선명한 3D 깊이 맵을 생성한다. 하드웨어 변경 없이 알고리즘 최적화만으로 성능을 끌어올린 점에서 의미가 크다.
로비언트는 약 1,000만 개의 원시 데이터를 기반으로, 극한 환경에 특화된 200만 쌍 이상의 깊이-RGB 학습 데이터셋을 구축했으며, 이를 오픈소스로 공개할 계획이다.
오르벡 렌 중(Len Zhong) 제품 관리 책임자는 “칩 수준의 심도 데이터와 공간 인식 알고리즘의 결합은 로봇 센싱과 인지 지능의 긴밀한 통합 사례”라며 “실제 배포 환경에서의 신뢰성이 핵심”이라고 설명했다.









