사진. 포스티드 로보틱스
AI, 로보틱스, 영상 인식 융합기술의 연구개발에 주력하는 일본의 포스티드 로보틱스(Forcesteed Robotics, 이하 포스티드)는 가와사키중공업과 함께, 이동형 로봇을 위한 ‘시맨틱 맵 생성 기술’을 공동 개발하고, 양사의 소셜 이노베이션 거점인 CO-CREATION PARK KAWARUBA에서 실증 시험을 시작했다고 밝혔다.
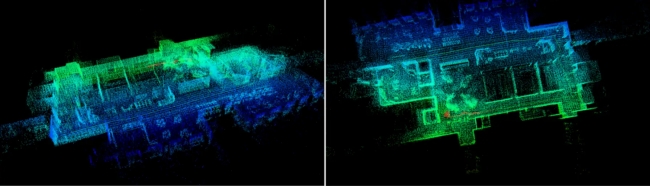
이번에 양사가 개발한 기술은 기존의 SLAM(자기위치추정 및 지도작성)을 넘어, 로봇이 카메라와 LiDAR 센서를 이용해 환경을 스스로 인식하고, 그 안의 요소들에 ‘의미’를 부여하는 방식으로 동작한다. 단순히 구조를 그리는 것이 아니라 ‘통로’, ‘창문’, ‘작업 구역’ 등 주변 공간의 의미를 파악해 자율적으로 판단하고 행동할 수 있는 ‘의미 지도(semantic map)’를 생성하는 것이 특징이다.
기존 SLAM 기술은 로봇의 위치 추정과 환경의 기하학적 구조 파악에만 초점이 맞춰져 있었으며, 생성된 지도에는 ‘장애물’이나 ‘경로’ 같은 구조적 정보는 포함됐지만, 인간이 인지하는 의미 수준의 정보는 부족했다. 최근에는 대규모 언어 모델(LLM)의 발전에 힘입어 이미지나 점군 데이터에서 의미 정보를 추출하려는 시도가 활발히 이루어지고 있지만, 이를 기반으로 로봇이 실시간으로 의미 기반의 공간 인식을 수행하는 기술은 아직 초기 단계에 머물러 있다.
이에 포스티드는 AI 및 영상 인식 기술 역량을, 가와사키중공업은 로봇 시스템 응용 노하우를 접목해, SLAM 기반의 위치 추정 및 지도 작성과 병행해 실시간으로 의미 정보를 추출하고 별도로 맵핑하는 기술을 구현했다. 이 시스템은 카메라와 LiDAR 데이터를 바탕으로 환경 내 사물에 ‘의미 라벨’을 자동 부여하며, 로봇은 이를 활용해 예를 들어 '회의실을 찾아가라'는 명령에도 스스로 판단해 최적의 경로를 설정할 수 있다.
실내 환경에서 실시된 자사 시험에서는 80% 이상의 의미 라벨 인식 정확도를 확보했으며, 기존 방식 대비 지도를 준비하는 데 필요한 시간과 비용이 줄어들고, 동적으로 변화하는 환경에 대한 적응력도 향상되는 등 다양한 장점이 확인됐다. 다만 계산 부하 증가, 어두운 환경에서의 카메라 성능 저하, 의미 라벨의 범용성 확보 등은 향후 개선이 필요한 기술적 과제로 남아 있다.
포스티드와 가와사키중공업은 이번 기술을 기반으로 향후 실내 작업, 시설 점검, 보안 순찰 등의 현장에 실제 적용하는 것을 목표로 하고 있으며, 2027년까지의 사회 실장을 지향하고 있다. 양사는 기존의 정적인 지도 기반 내비게이션에서 벗어나, 로봇이 ‘지도 없이도 의미를 이해하며 자율적으로 행동하는’ 미래를 지향하고 있다. 더불어 로봇이 사람의 사회 속에서 자연스럽게 녹아들어 함께 행동할 수 있는 ‘융합형 로봇’의 실현을 위해 지속적인 연구와 실증을 이어갈 예정이다.