MIT CSAIL 연구팀이 필요에 따라 변할 수 있는 소프트 로봇을 개발했다(사진. MIT CSAIL).
단단한 외골격으로 무장한 로봇이 일반적이지만, 물고기나 기타 질퍽한 생물에서 영감을 얻은 부드러운 몸통의 로봇은 변화하는 환경에 더 잘 적응하고 안전하게 작업할 수 있다는 장점이 있다.
MIT의 컴퓨터 과학 및 인공지능 연구소(MIT CSAIL)는 컴퓨터 시뮬레이션으로 작업하면서 필요에 따라 변할 수 있는 연체 로봇에 대한 개념을 개발했다. 이 접근법은 단단한 로봇의 강도와 정밀도와 부드러운 로봇의 유동성 및 안전성을 결합한 차세대 로봇을 가능하게 한다. 이 논문의 주 저자인 제임스 베른(James Bern)은 “이것은 우리가 두 세계를 최대한 활용할 수 있는지 확인하기 위한 첫 번째 단계”라고 밝혔다.
로봇 공학자들은 로봇 팔에 풍선과 같은 챔버를 부풀리거나 진공 밀봉된 커피 찌꺼기로 물체를 잡는 등 소프트 로봇을 작동하기 위해 무수한 메커니즘을 실험했다. 그러나 소프트 로봇 공학에서 해결되지 않은 주요 과제는 제어이며, 주어진 목표를 달성하기 위해서는 로봇의 액추에이터를 어떻게 구동할 수 있는지 파악해야 한다.
최근까지 대부분의 소프트 로봇은 수동으로 제어됐지만, 2017년 베른과 그의 동료들은 알고리즘이 지배를 받을 수 있다고 제안했다. 연구팀은 케이블로 구동되는 소프트 로봇을 제어하는 데 도움이 되는 시뮬레이션을 사용, 로봇의 목표 위치를 선택하고 거기에 도달하기 위해 각 케이블을 얼마나 당겨야하는지 컴퓨터로 파악했다.
이제 연구팀은 로봇의 움직임을 넘어서는 질문을 하기 위해 유사한 기술을 사용하고 있다. 케이블을 올바른 방법으로 당기면 로봇이 뻣뻣하게 움직일 수 있는가에 대한 질문에 베른은 “인간의 팔에서 얻은 영감 덕분에 적어도 컴퓨터 시뮬레이션에서는 가능하다”라고 밝혔다.
이두근만 수축하면 팔꿈치가 어느 정도 구부러질 수 있지만, 이두근과 삼두근을 동시에 수축하면 팔이 그 위치에 단단히 고정될 수 있다. 베른은 이와 같은 원리를 로봇에 적용한 것으로 나타났다.
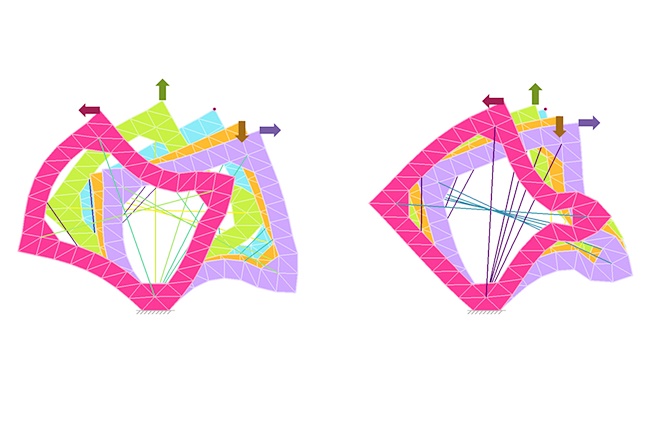
연구진의 논문은 케이블 구동 소프트 로봇의 위치와 강성을 동시에 제어하는 방법을 제시한다. 이 방법은 로봇의 여러 케이블을 활용, 일부는 몸을 비틀고 돌리는 데 사용하고 다른 케이블을 사용해 서로 균형을 맞춰 로봇의 강성을 조정한다. 베른은 발전이 기계 공학의 혁명이 아니라 케이블 구동 소프트 로봇을 제어하는 새로운 방식이라고 강조했다.
베른은 “이것은 소프트 로봇을 제어할 수 있는 방법을 확장하는 직관적인 방법이다. 주문형 강성에 대한 아이디어를 컴퓨터가 함께 사용할 수 있는 것으로 인코딩하는 것”이라고 밝혔다.
베른은 컴퓨터에서 자신의 로드맵을 사용해 다양한 모양의 로봇에서 움직임과 강성 조정을 시뮬레이션했다. 그는 로봇이 강화됐을 때 또는 밀렸을 때 변위에 얼마나 잘 견딜 수 있는지 테스트했다. 일반적으로 로봇은 모든 각도에서 똑같이 저항하지는 않았지만 의도 한대로 견고하게 유지된 것으로 나타났다.
버클리 캘리포니아 대학교의 무함마드 후세인(Muhammad Hussain) 전기 엔지니어는 “강성을 바꿀 수 있는 이중 모드 재료는 매력적”이라고 밝혔다. 그는 소프트 로봇이 언젠가는 혈류를 통해 이동한 다음 강화돼 신체의 특정 부위에서 미세 수술을 수행할 수 있는 건강 관리의 잠재적 인 응용 분야를 확장할 것이라고 예측했다.
한편 베른은 주문형 강성 제어 시스템을 테스트하기 위해 프로토타입 로봇을 제작하고 있다. 이들은 인간과의 상호 작용은 확실히 소프트 로봇 공학의 비전으로 보며, 로봇의 움직임이 안전을 향상시키고 딱딱해지는 능력은 환자를 돌보는 데 도움이 될 것으로 기대하고 있다.









