서울대 연구팀이 하나의 센서로 물건을 잡는 의도를 파악, 효과적으로 돕는 로봇을 개발해냈다. (사진. 서울대학교)
일상생활에서 손의 악력은 안정적인 작업을 위해서는 필수불가결한 요소이다. 공구를 사용하는 현장에서부터 화재에 대응해야 하는 재난 상황까지 물건을 단단히 잡는 동작이 요구되는데, 이러한 동작을 오래 지속할 경우 팔 근육에 피로감이 쌓여 오랜 시간 안정적인 작업을 수행하는 데에는 어려움이 있다. 이에 따라 미국화재예방협회(National Fire Protection Association)에서는 안전한 화재 진압 및 생명구조를 위한 요소로 소방관들의 악령 측정 및 일정 수준 이상 유지할 것을 요구하고 있다.
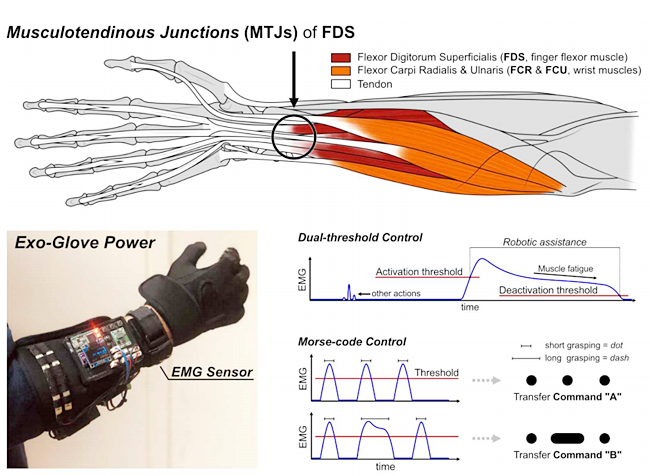
서울대학교 체육교육과 안주은 교수를 비롯한 서울대 기계공학부 조규진 교수, 카이스트 전산학부 조성호 교수, 분당서울대학교병원 공현식 교수가 단 하나의 센서만으로 물건을 쥐고자 하는 의도를 파악, 이를 효과적으로 도울 수 있는 장갑을 개발해냈다. 개발된 장갑은 힘을 줄 경우 근육을 중심으로 발생하는 전기적 신호 근전도를 감지, 동작의 의도를 파악한다. 이와 같은 의도 파악은 그간 의족 및 의수 제어에 주로 사용돼 왔으나, 장갑과 같은 착용형 로봇에 적용하는 데에는 한계가 있었다.
특히 정확한 의도 파악을 위해서는 여러 개의 근전도 센서를 여러 근육에 부착시켜 사용해야 하는데, 이러한 근육의 위치는 사람마다 다르고 동작을 수행하는 과정에서 센서가 조금이라도 원래의 위치에서 벗어나면 의도 파악이 부정확해지기 때문이다. 또한 팔을 펴거나 굽히는 자세의 변화에 의한 의도 파악 성능이 저하되는 문제도 있다. 융합 연구팀은 큰 악력을 내고자 할 때만 손목 부근에서 큰 근전도 신호가 감지되는 현상을 발견하고 이를 이용해 장갑형 로봇을 직관적으로 제어하는 방법을 개발했다.
결과적으로 연구팀은 여러 개의 센서에 의존하는 기존의 방식과는 전혀 달리 단 하나의 센서를 손목 부분에 밀착시키는 것만으로 큰 악력을 내고자 하는 의도를 정확히 파악할 수 있었으며, 성능은 팔의 각도 등 자세 변화에 무관하게 높게 유지할 수 있게 됐다. 새로 개발된 로봇 장갑의 의도 파악 성능은 5개의 센서를 팔뚝 주위의 여러 근육에 부착시켜 의도를 파악하는 기존의 방법보다도 우수한 것으로 나타났다.
한편 이번 연구에는 인체 관련 발견과 운동학적 실험, 기계학습, 소프트 로봇제작 등 여러 분야에 걸친 전문성이 융합된 대표적인 사례이다. 특히 단일 센서만으로 정확한 의도 파악 및 악력 증강이 가능함을 보여준 연구결과는 앞으로 신체 능력 증강을 위한 실용적인 착용형 로봇의 개발에 중요한 기여를 할 것으로 예상된다.









