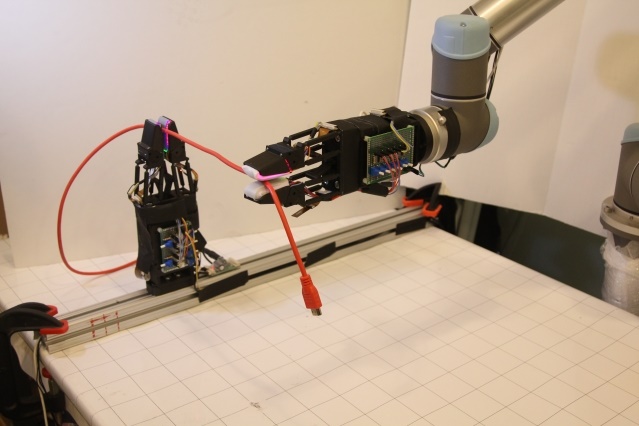
MIT CSAIL이 케이블을 조작할 수 있는 소프트 로봇 그리퍼를 선보였다. (사진. MIT CSAIL)
인간의 경우 로프, 와이어 또는 케이블과 같은 얇고 유연한 물체를 조작하는 것이 어려울 수 있다. 그러나 이러한 문제가 인간에게 어렵다면 로봇은 거의 불가능한데, 이는 케이블은 손가락 사이로 미끄러짐에 따라 모양이 계속 변하고 이때 로봇의 손가락은 케이블의 위치와 움직임을 지속적으로 감지하고 조정해야 하기 때문이다.
MIT의 컴퓨터 과학 및 인공지능 연구소(MIT CSAIL)와 MIT 기계 공학과의 연구원 그룹은 인간을 모방하는 방식으로 다른 각도에서 작업을 추구했다. 이들은 고해상도 촉각 센서가 있는 한 쌍의 소프트 로봇 그리퍼를 사용, 자유롭게 움직이는 케이블을 성공적으로 조작했다. 이와 같은 시스템은 향후 산업 및 가사 작업에 활용될 수 있으며, 언젠가는 로봇이 매듭 묶기, 와이어 성형 또는 외과 봉합과 같은 작업을 도울 수 있을 것으로 기대된다.
해당 과제를 위해 연구팀은 우선 새로운 두 손가락 그리퍼를 만드는 데 목표를 두었다. 또한 반대쪽 손가락은 가볍고 빠르게 움직여 힘과 위치를 실시간으로 조정할 수 있도록 했다. 특히 손가락 끝에는 카메라가 내장된 부드러운 고무의 시각 기반 ‘GelSight’ 센서가 있다. 그리퍼는 제어 시스템의 일부로 움직일 수 있는 로봇 암에 장착된다.
이후 두 번째 단계로는 케이블 조작을 허용하는 인식 및 제어 프레임 워크를 만드는 것을 목표로 했다. 이들은 지각을 위해 GelSight 센서를 사용해 손가락 사이의 케이블 위치를 추정하고 케이블이 미끄러질 때 마찰력을 측정했다. 또한 하나는 그립 강도를 조절하고 다른 하나는 그리퍼 내에서 케이블을 유지하기 위해 그리퍼 포즈를 조정하도록 했다.
암에 장착할 때 그리퍼는 임의의 잡기 위치에서 시작해 USB 케이블을 안정적으로 따라갈 수 있다. 아울러 두 번째 그리퍼와 함께 로봇은 케이블 끝을 찾기 위해 사람처럼 케이블을 손으로 움직일 수 있다. 이는 재료와 두께가 다른 케이블에도 적용할 수 있다.
또한 이 로봇은 그 위력의 추가 데모로 이어 버드를 휴대폰에 꽂을 때 인간이 일상적으로 하는 작업을 수행했다. 자유롭게 떠다니는 이어 버드 케이블로 시작해 로봇은 케이블을 손가락 사이로 밀어 넣고 플러그가 손가락에 닿으면 멈추고, 플러그의 자세를 조정하며 마지막으로 플러그를 잭에 삽입할 수 있었다.
MIT CSAIL 관계자는 “케이블 조작, 천 접기 및 끈 매듭과 같이 부드러운 물체를 조작하는 것은 일상생활에서 매우 흔하다”라며, “특히 작업이 반복적이거나 지루할 경우, 혹은 안전하지 않은 경우에는 로봇이 인간이 이러한 종류의 작업을 수행을 도울 수 있도록 하고 싶다”고 전했다.
케이블 추적은 두 가지 이유로 어려움을 겪는다. 우선 부드러운 슬라이딩을 가능하게 하기 위한 파지력과 그리퍼의 손가락에서 케이블이 떨어지는 것을 방지하기 위한 파지 포즈를 제어해야 한다.
이 정보는 일반적으로 가려지고 해석하는 데 비용이 많이 들고 때로는 부정확하기 때문에 지속적인 조작 중에 기존 비전 시스템에서 캡처하기가 어렵다. 또한 이 정보는 비전 센서만으로는 직접 관찰 할 수 없기 때문에 팀은 촉각 센서를 사용한다. 그리퍼의 조인트도 유연해 잠재적인 충격으로부터 보호하는 데에도 효과적이다.
알고리즘은 재료, 강성 및 직경과 같은 다양한 물리적 특성을 가진 다른 케이블과 다른 속도의 케이블로 일반화될 수도 있다. 팀의 그리퍼에 적용된 다른 컨트롤러를 비교할 때 제어 정책은 다른 3개보다 더 먼 거리에서 케이블을 손에 들고 있을 수 있는 것으로 나타났다.
한편 팀은 GelSight 센서의 볼록한 표면 때문에 손가락 가장자리에 도달했을 때 케이블을 뒤로 당기기가 어렵다는 것을 관찰했다. 따라서 그들은 전반적인 성능을 향상시키기 위해 손가락 센서 모양을 개선하기를 희망한다.
이들은 앞으로 케이블 라우팅 및 장애물을 통한 케이블 삽입과 같은 보다 복잡한 케이블 조작 작업을 연구할 계획이며 궁극적으로 자동차 산업에서 자율적인 케이블 조작 작업을 탐색하고자 한다.