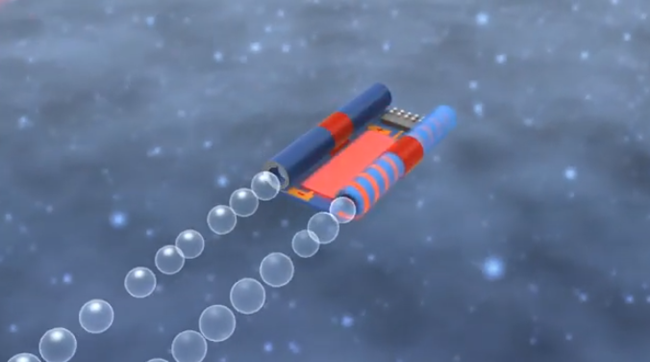
사진. Chemnitz University of Technology 홍보동영상 갈무리
켐니츠 공과대학(Chemnitz University of Technology)이 트윈 제트 엔진으로 구동 및 제어되는 마이크로 전자 로봇을 개발했다. 마이크로 전자 로봇은 0.8㎜길이, 0.8㎜폭 및 0.14㎜높이를 자랑한다. 1센트 조각의 직경은 약 16㎜로, 매우 유연하고 운동성이 뛰어나 다양한 기능을 수행할 수 있다.
연구진은 유연한 마이크로 로봇이 다양한 작업을 수행할 수 있는 온보드 에너지 시스템을 함께 제시했다. 이 시스템은 수용액으로도 조정할 수 있으며, 원격으로도 제어가 가능하다. 아울러 로봇에는 광원과 마이크로암이 있어 무선으로 전원을 공급할 수도 있다.
이와 같은 연구 결과는 미세한 기술력이 요구되는 로보틱스 및 의료 기술 분야에서 높은 효율을 얻을 수 있을 것으로 전망된다. 특히 약물 표적 투여 및 유기체 내 질병 진단에 있어 최적의 효과를 얻을 수 있어 눈길을 끌었다.
10년 이상 지속된 마이크로 로봇 및 마이크로 모터 연구는 다양한 분야의 과학자들의 관심을 높여왔다. 또한 자체 제어 가능한 드라이브와 함께 의료용 소형 잠수함을 사용한다는 것은 근본적인 연구 및 응용 연구를 반복적으로 유발했다.
지금까지는 공상 과학 소설로 여겨져 왔지만, 최근 완전히 제어 가능하고 조종 가능한 마이크로 로봇을 개발하는 데 많은 이들의 관심이 쏠리면서 새로운 패러다임이 제시되고 있다.
현재 제시된 시스템의 추진 장치는 산소 버블의 가압된 배출 통해 추력을 발생시키는 롤업 마이크로 튜브로 구성된다. 연구진들은 두 개의 마이크로 튜브 중 하나에서 공정을 열적으로 제어, 마이크로 로봇을 다방면으로 조정하고 있다.
여기에 폴리머 기반 나노 막의 조합으로 완전한 마이크로 전자 시스템을 개발했는데, 이는 상당히 눈에 띄는 성과이다. 최종 단계에서는 열 반응성 폴리머의 얇은 층을 만들어 마이크로 로보틱 시스템의 한쪽 끝에 액추에이터를 도입했다.
마이크로 로봇은 에너지를 필요로 하지만 소켓에서 간단히 충전될 수 없기 때문에, 외부 송신기와 온보드 수신기 코일을 마이크로 시스템에 통합하는 무선 에너지 전송 시스템이 필요하다. 이 원리는 휴대폰을 무선으로 충전하는 방법과 유사하지만, 이러한 작은 마이크로 로봇에서 전기 에너지의 무선 전송이 사용되는 것은 이례적인 일이다.









